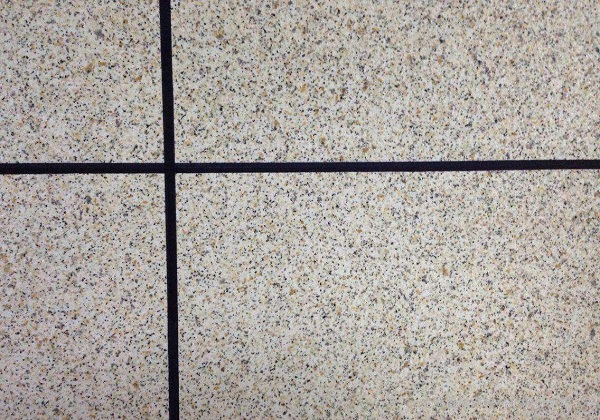
由于真石漆本身比较重,用量大,一般都采用了大包装规格(75K

户外广告表现形式丰富多彩,昆明写真广告制作,特别是高空气球广
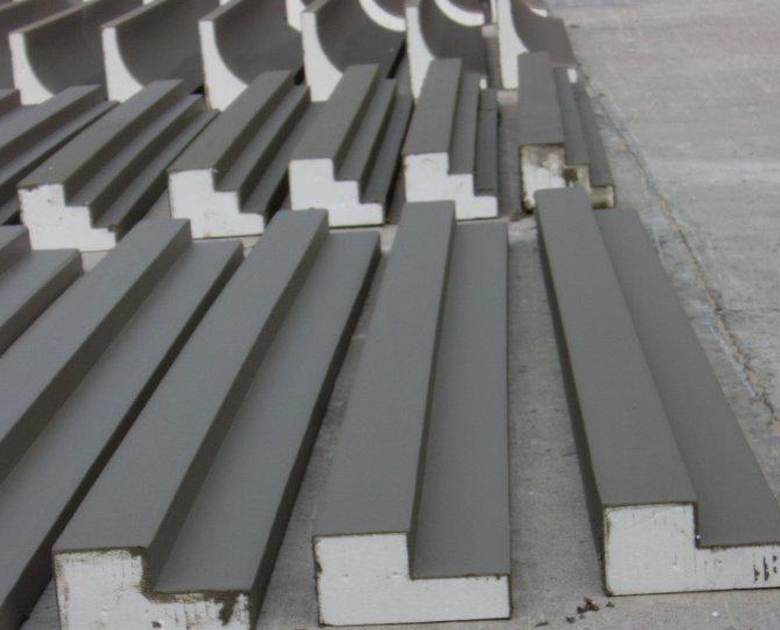
想必大家对云南eps线条已经比较熟悉的了,在房子的建筑装修中

标识牌设计需要考虑所处的周边建筑环境和人文特点等因素。昆明标

加厚高强度镁铝合金型材,不锈钢等材料是比较好的选择,昆明岗亭

甘肃合理叉车轮胎厂家发现叉车轮胎怎么换。叉车轮胎胎面出现锯齿

沈阳不锈钢管安装安装方式的不同分为不同的种类,那么不锈钢水管

冷风机和排管使用的详细优缺点对比 制冷系统是冷库区别于

这儿的水翠绿且恬静,特别适合带著小朋友在这儿嬉水,关键是完全

众所周知,混凝土的主要成分是水泥、砂石,现在市场的混凝土搅拌